WPI High Power Rocketry Club 2020-21


Overview
WPI High Power Rocketry Club (HPRC) is WPI’s competitive student rocketry team. In the 2020-21 compeition year, HPRC competed in the college division of the NASA sponsored USLI competition. The USLI competition involves the design, construction, testing, and launch of a high power rocket as well as a payload which is required to complete a specified mission. Teams are scored on performance in the competition as well as periodic design reviews and documentation throughout the course of the year-long project. The team designed and built a high power rocket named Sirius with a planned apogee of 4550 ft AGL. Additionally, the team developed a lander payload called Polaris, tasked with landing softly and righting itself to within 5 degrees of level befoe taking a panaramic photograph of its landing site.
Safety Officer
This was my second year on the team and my first in a leadership role. Serving as Safety Officer, I was responsible for ensuring the safety of all team members and bystanders at all HPRC events, educating members about safety practices, and writing comprehensive safety documentation throughout the year. This safety documentation includes general safety, manufactuing and materials safety, complaiance with NAR and FAA regualtions, hazard analyses tables, and safety checklsits. In this role I took on a lot more responsiblity on the team as a member of the Officer Board, and made several improvements including reorganizing safety documenation and files, as well as digitizing assembly and launch safety checklists.
Avionics Subsystem
My work on the team this year has been on the development of the avionics system for the rocket. The avionics system is responsible for recording and logging data during flight and controlling the rocket’s airbrake system. Avionics encompasses all of the electronics on the rocket excluding recovery electronics. The system is housed in the avionics bay, which is located at the coupler between the lower and middle airframe sections along with the airbrakes. The system includes a number of inertial sensors and a GPS to record flight data and track the rocket’s state and position. This data is intended to be transmitted to the team via radio transceivers during flight and stored onboard the rocket for review after recovery. The flight data is also used by the avionics computer firmware to predict the vehicle’s apogee and to actuate the airbrake system accordingly to achieve the desired apogee. All of the electronic components in the avionics system are integrated into a custom printed circuit board (PCB) called Fusion, designed by the team. The board runs custom avionics computer firmware developed by the team which includes a control algorithm for the air brakes.
The avionics system features several sensors and many other electronic components to accomplish its objectives. A Teensy 3.2 microcontroller is used to interface with the various peripheral devices and to handle the necessary computation. The sensors onboard the rocket include a barometric pressure sensor to determine the rocket’s altitude and an inertial measurement unit (IMU) consisting of an accelerometer, gyroscope, and magnetometer to measure the rocket’s acceleration and heading. A GPS is included to measure the rocket’s velocity and to track its position. Telemetry data is transmitted with a LoRa long range radio transceiver. Flight data is also recorded onboard the rocket with the use of a serial flash memory chip. Other components include a power system and connectors for additional peripheral devices.


For initial testing purposes, breakout boards were used to test sensor functionality and to begin prototyping and programming. For the final system however, the team opted to integrate all of the electronic components into a single board solution. This is advantageous because it allows for the electronics to be neat and compact within the avionics bay and greatly simplifies wiring. The team used the free PCB software KiCad to design the custom circuit board. Designing a circuit board is a multistep process which includes creating schematics of the circuit, laying out components on the board, and routing the electrical connections between the components. This process also involves the selection of components and considering functionality and manufacturability.
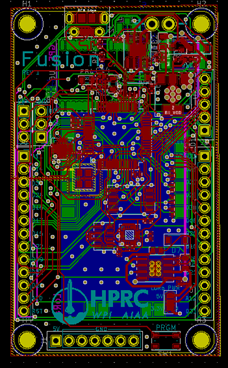
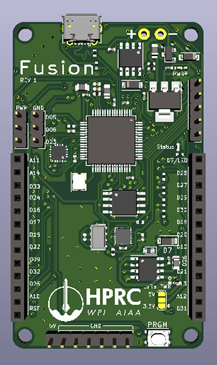
The schematics for the board were created first by importing schematic symbols for the microcontroller and peripheral devices and building the necessary circuitry around them. Finding schematics of relevant breakout boards on the Internet was a valuable resource for designing the circuit. Once the schematics were completed, the team found all of the necessary components from online suppliers and imported the appropriate footprints into KiCad. Next, the layout of the board was completed. All of the components were carefully arranged on the board to satisfy space constraints and good electrical design practices. Traces were then routed between components to make all of the necessary electrical connections. Finally, a silkscreen layer was added to label components and add graphics. This completed the design of the avionics board and it was prepared for manufacturing from JLC PCB. The final layout and routing of thr board is shown in the image on the left, and a 3D render of the board is shown to the right.